Logiciel capture d'écran:
Détails logiciels:
Version: 1.0.2
Date de transfert: 15 Apr 15
Développeur: Dihav
Licence: Gratuit
Popularité: 92
Taille: 11911 Kb
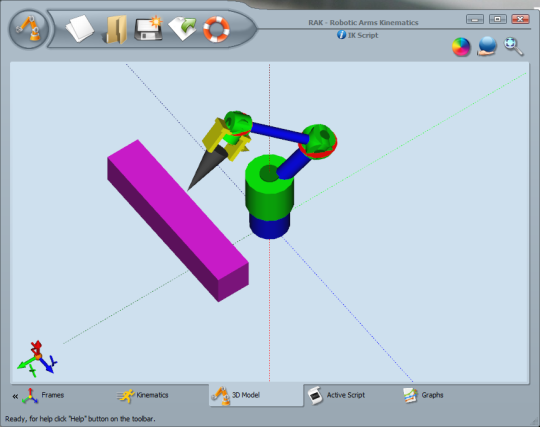
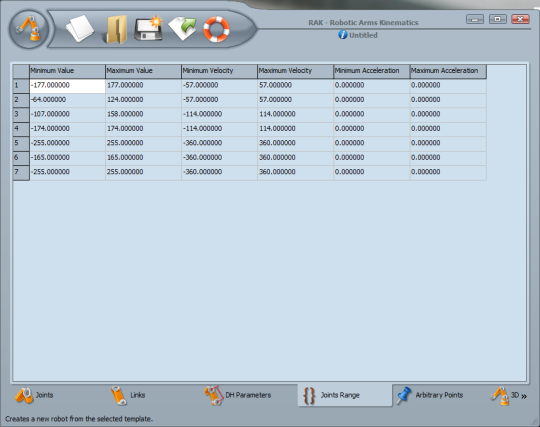
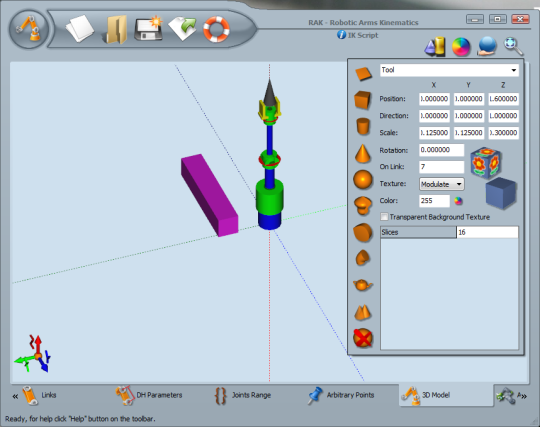
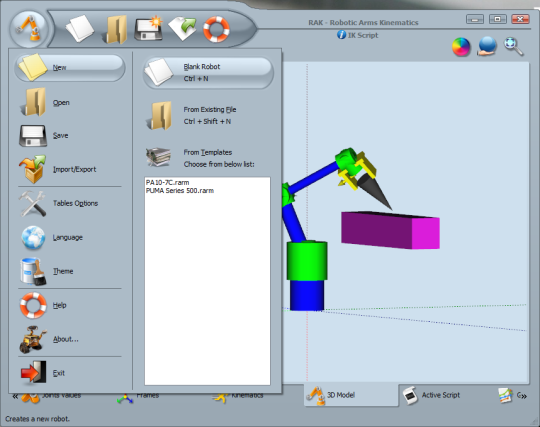
RAK est un programme pour la modélisation et le calcul bras robotiques leur cinématique.
Ce programme peut simuler boucle ouverte, robots à chaîne unique.
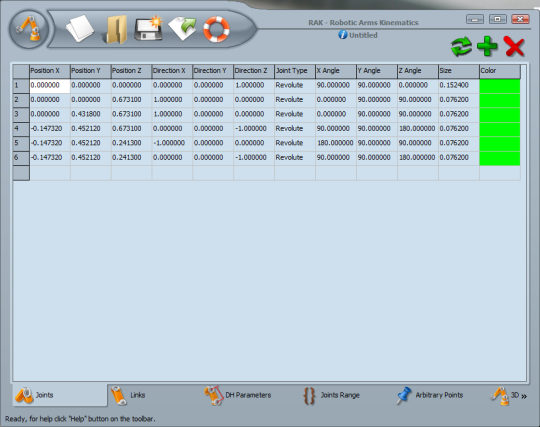
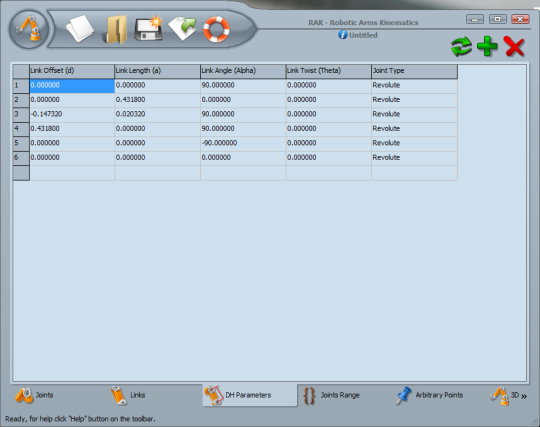
Vous pouvez modéliser un robot par ses positions de joints ou Denavit-Hartenberg (DH) paramètres.
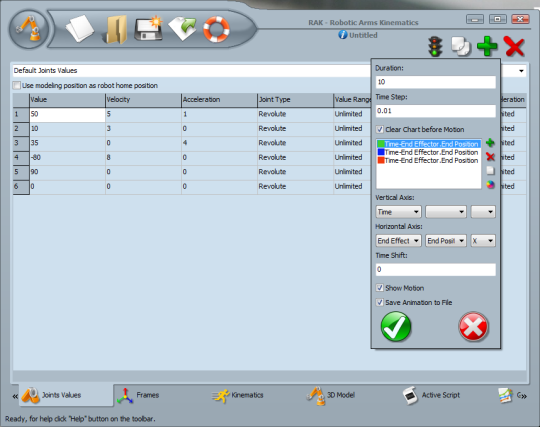
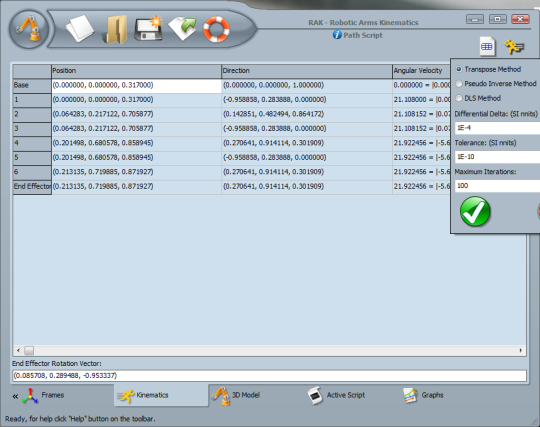
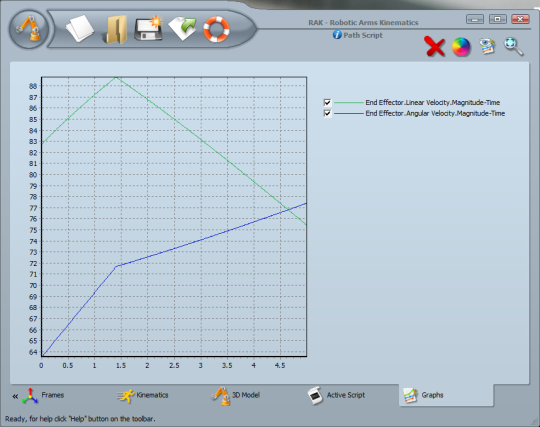
Vous pouvez calculer la cinématique et cinématique inverse du robot par ce programme.
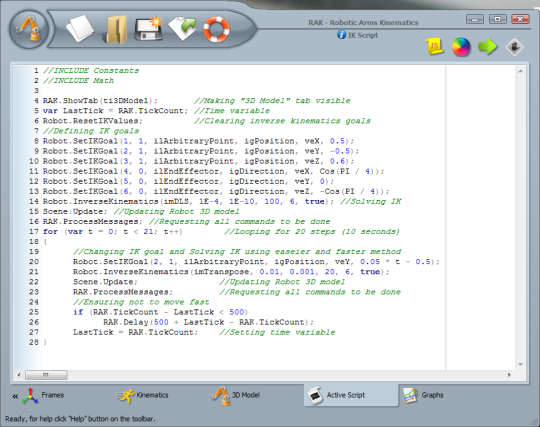
Il ya aussi une zone de programmation pour écrire des programmes et de contrôler des robots réels.

Commentaires non trouvées